AutoAssembler ASI: Accelerated Spatial Intelligence
Sai Nelaturi
Adam Sage
March 4, 2026 • 7 min read
The missing layer for Physical AI in Advanced Manufacturing
-
Physical AI systems must understand how real products are assembled.
The instructions for building complex hardware ultimately come from CAD designs. -
Industrial products contain hundreds or thousands of parts.
Their geometric relationships determine how parts move, interact, and can be assembled. -
But CAD models encode geometry — not assembly intelligence.
The motion constraints that govern assembly must be inferred directly from the geometry. -
Recovering those constraints requires evaluating trillions of spatial relationships.
Traditional CPU-based approaches cannot perform this analysis at industrial scale. -
Accelerated Spatial Intelligence (ASI) is the missing computational layer — a GPU-native approach that extracts assembly constraints directly from product geometry.
AutoAssembler is built on this foundation.
AutoAssembler is a spatial intelligence and planning system that compiles product designs expressed in CAD into feasible assembly instructions. It operates on full-fidelity industrial assemblies with hundreds to thousands of parts, reasoning explicitly about how parts can physically move, interact, and be assembled.
AutoAssembler’s Accelerated Spatial Intelligence (ASI) Engine combines GPU-accelerated geometric processing with AI planning to construct and efficiently explore the combinatorial space of assembly interactions.
The ASI Engine is the computational foundation of AutoAssembler, responsible for extracting spatial constraints directly from raw geometry data at industrial scale.
At its core, the ASI engine transforms raw geometry into motion constraints. These constraints define how parts are assembled, how they move, and in what order, thereby defining the complete space of feasible assembly sequences.
Computing these spatial relationships robustly and at industrial scale is the missing computational layer required to make Physical AI viable for advanced manufacturing.
AutoAssembler now makes this automatic.
Contact, Interference, and Clearance
The ASI Engine takes a fully assembled CAD model as an input. From this static end state, it infers the physical constraints that govern assembly and disassembly.
The first and most critical step in this process is computing pairwise spatial relationships between parts.
Spatial relationships of interest between assembled parts fall into three categories:
- Contact: surfaces touch and constrain relative motion
- Interference: parts overlap, either intentionally (for example modeled threads) or unintentionally (due to design errors).
- Clearance: parts are separated but sufficiently close to imply functional interaction
These relationships define the feasible motions of parts relative to each other. They also form the foundation of Design for Assembly (DfA) analysis, which today is largely performed through manual visual inspection and static rule checks.
CAD systems sometimes include mating constraints, which specify how parts should align or move relative to each other (for example concentric shafts/holes or planar contacts). However, these constraints are frequently missing or unreliable in production designs.
Designers often remove mates because maintaining them during design changes requires solving large nonlinear constraint systems that scale poorly for large assemblies. As a result, most real-world CAD models encode geometry but not assembly intent.
The ASI Engine does not rely on these input constraints. Instead, it recovers assembly-relevant spatial relationships directly from geometry, robustly handling intended interferences, unintended collisions, and functional clearances.
This establishes a complete geometric foundation for downstream motion inference and planning.
GPU-Accelerated Spatial Computation
Industrial CAD models are represented as Boundary Representation (B-rep) surfaces optimized for precision and continuity. For spatial reasoning, these surfaces are tessellated into triangle meshes. At industrial scale this produces millions to tens of millions of triangles per assembly.
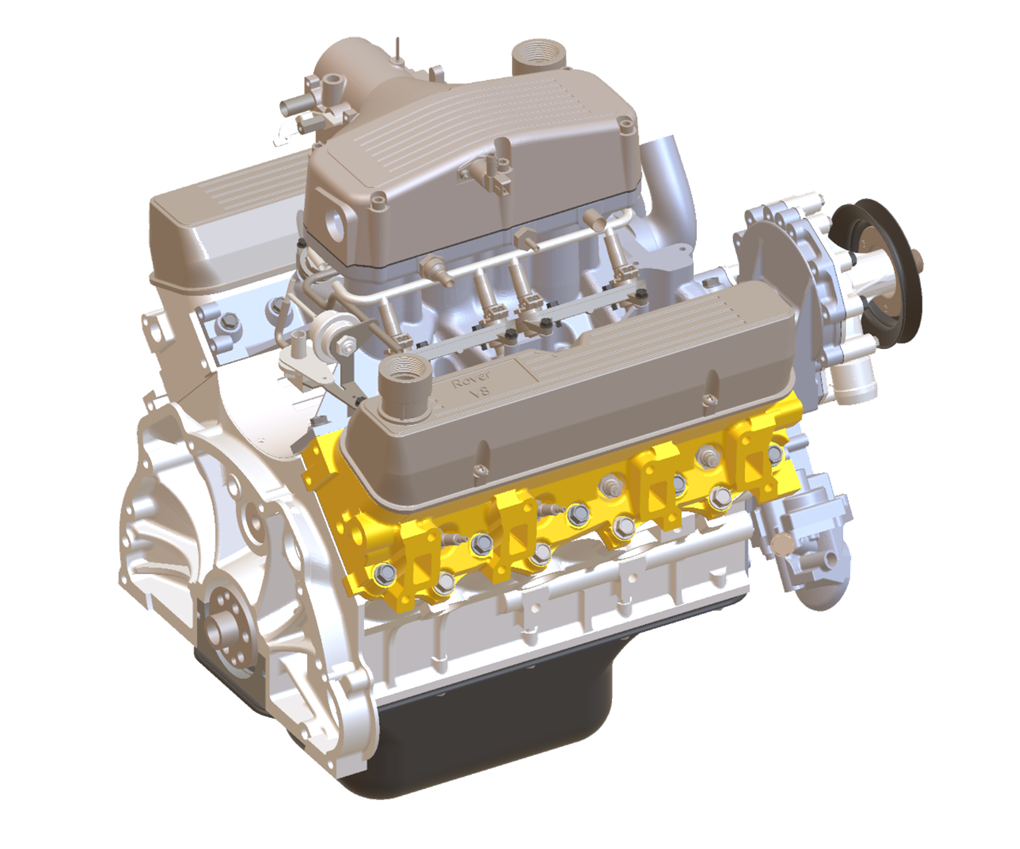
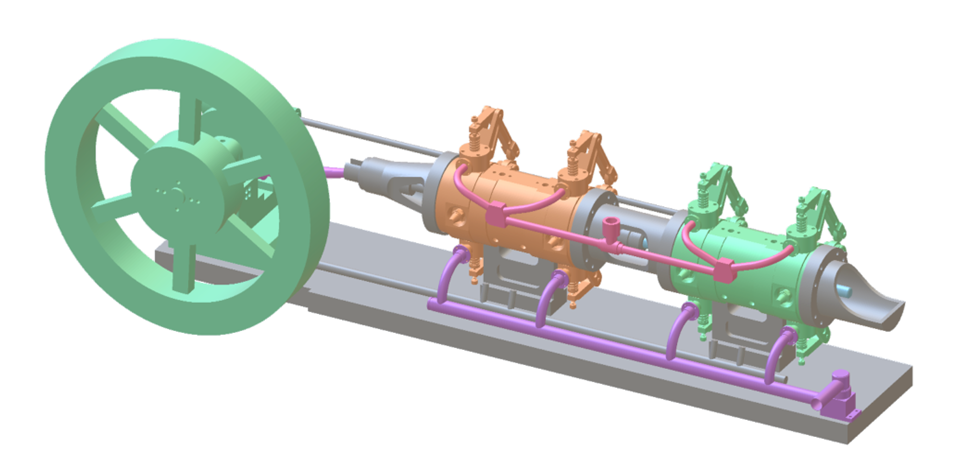
For an assembly with n triangles, naïvely evaluating all pairwise interactions is an O(n²) problem. In the Rover V8 assembly shown in Figure 1, this corresponds to approximately 9.5 million triangles, yielding over 4 × 10¹³ potential triangle interactions. Exhaustive approaches are not viable at this scale.
The ASI Engine resolves this by combining hierarchical spatial acceleration data structures with massively parallel GPU execution. Spatial queries are structured as tree traversals rather than pairwise comparisons, allowing the system to reject the vast majority of triangle interactions efficiently.
Even with such hierarchical acceleration structures, CPU-based implementations are insufficient at this critical stage of the assembly analysis and planning pipeline. Spatial inference is the first step in a larger AI planning system and must be computed quickly, repeatedly, and at industrial scale.
This requirement has important implications for the broader engineering software stack.
Most CAD, PLM, and simulation systems were designed around CPU-first geometric kernels developed decades ago, optimized for interactive modeling rather than large-scale spatial inference.
Accelerated Spatial Intelligence requires the opposite: billions of spatial queries executed as part of an AI planning system. Retrofitting this capability into legacy CPU-first architectures is extremely difficult. As a result, traditional engineering software platforms cannot realistically provide the spatial reasoning layer required for Physical AI. GPU acceleration is essential.

The ASI Engine is fully GPU-accelerated and implemented using NVIDIA Warp, which provides a Python-native interface to custom CUDA kernels. This allows AutoAssembler to combine the productivity of Python with the performance of GPU-native spatial computation.
Using Warp, AutoAssembler computes contact, interference, and clearance relationships for all part pairs in an assembly in seconds, even at multi-million-triangle scale. The engine is robust to real-world CAD imperfections, including:
- imperfect watertightness
- inconsistent surface normals
- degenerate surfaces
Warp’s GPU-native spatial data structures, combined with the scale of modern parallel hardware, make large-scale spatial inference tractable.
The result of this computation is a liaison graph, where nodes represent parts and edges encode spatial relationships and motion constraints Figure 2 shows a liaison graph generated for the Rover V8 assembly, illustrating the diversity of spatial relationships captured. This graph forms the geometric backbone of AutoAssembler’s planning pipeline and enables downstream reasoning about feasibility, motion, and sequencing.
Performance at Industrial Scale
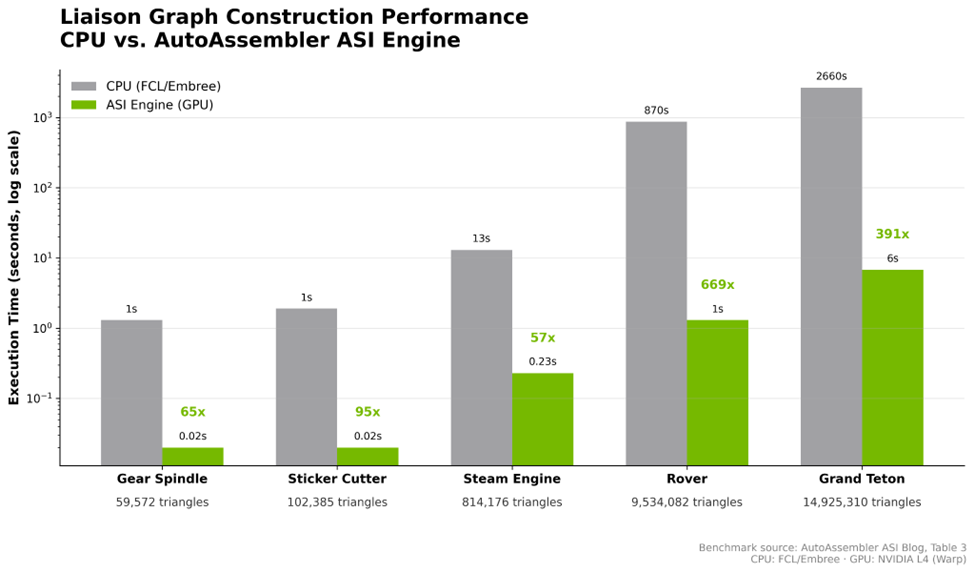
We benchmarked the ASI Engine against optimized CPU implementations using FCL and Embree.
All GPU benchmarks were run on an NVIDIA L4 GPU.
| Model | Number of Parts | Number of Triangles | FCL/Embree (s) | ASI Engine (s) |
|---|---|---|---|---|
| Gear Spindle | 30 | 59,572 | 1.3 | 0.02 |
| Sticker Cutter | 56 | 102,385 | 1.9 | 0.02 |
| Steam Engine | 216 | 814,176 | 13 | 0.23 |
| Rover | 383 | 9,534,082 | 870 | 1.3 |
| Grand Teton | 3,209 | 14,925,310 | 2,660 | 6.8 |
4a. Gear Spindle
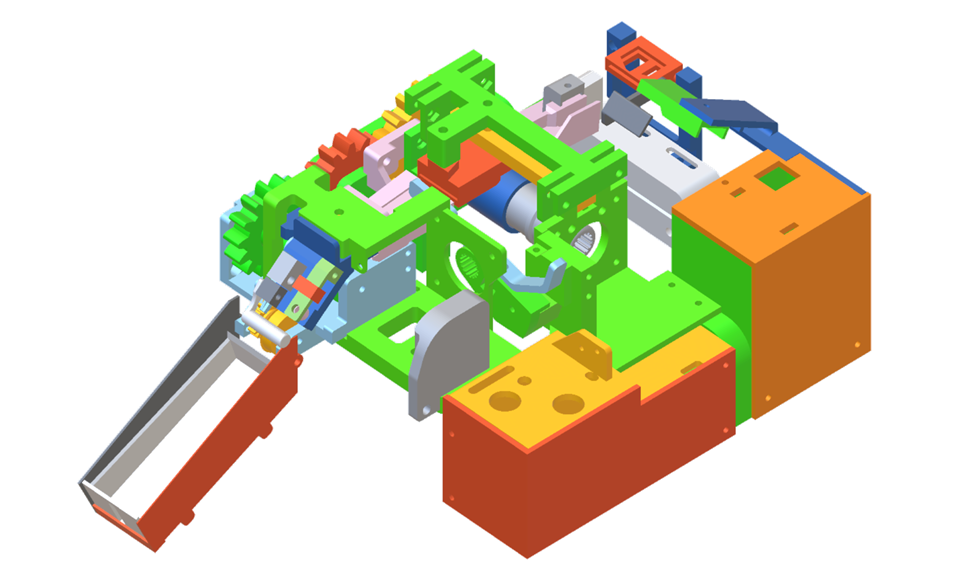
4b. Sticker Cutter
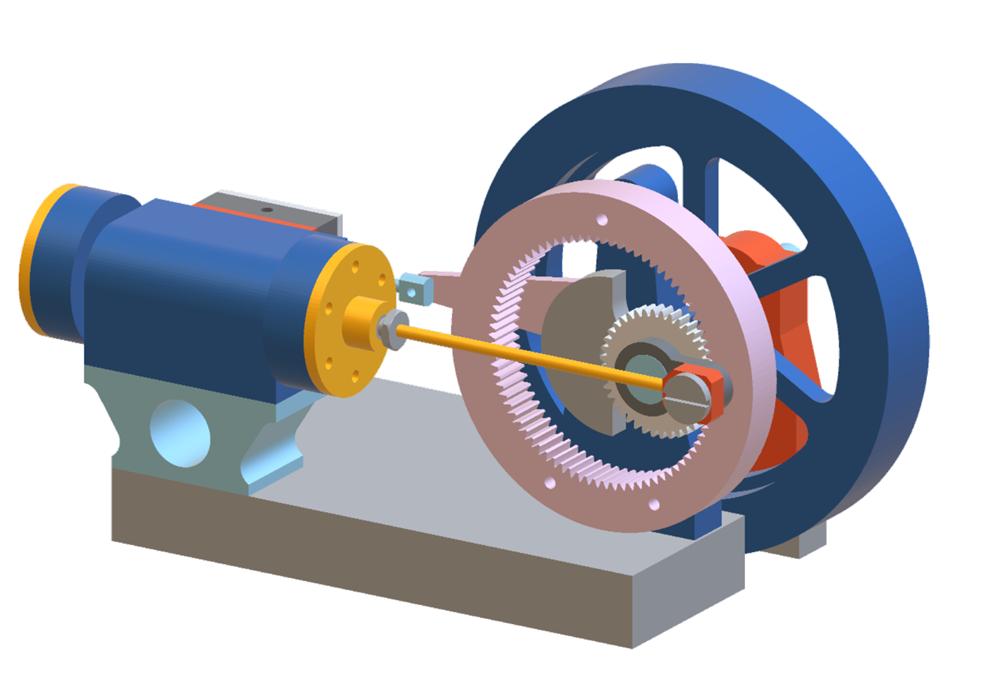
4c. Steam Engine
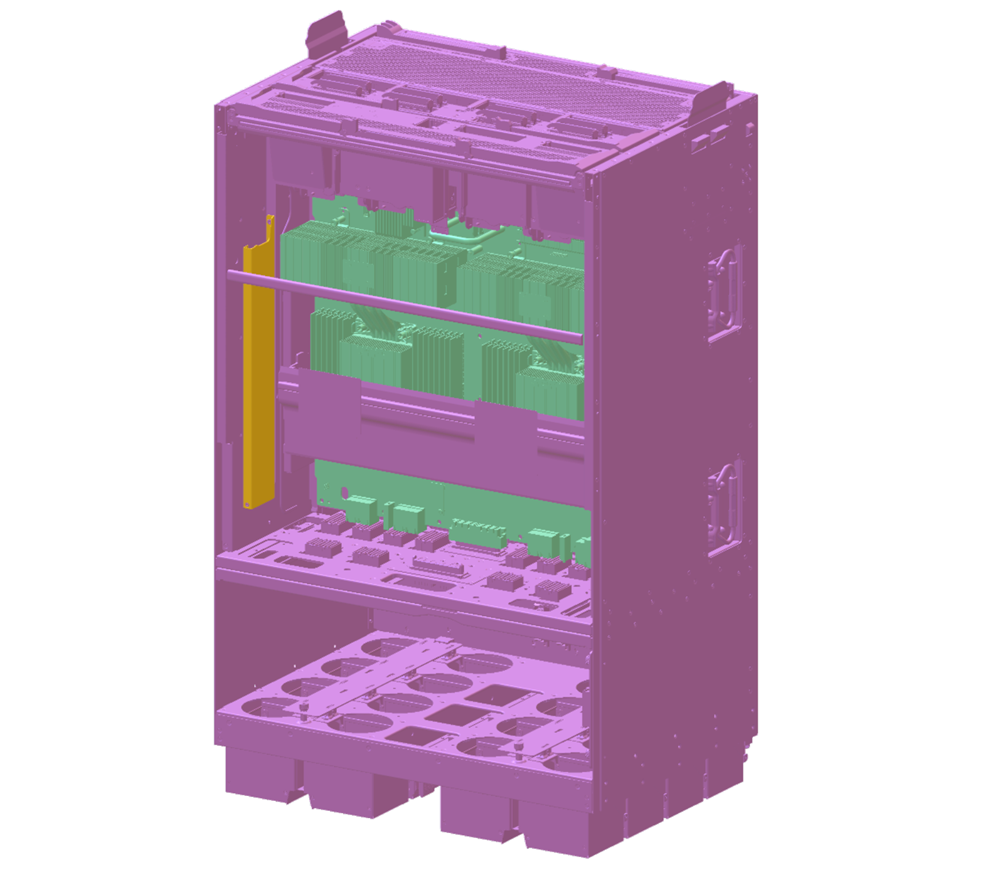
4d. Grand Teton
The results demonstrate two to three orders of magnitude speedup over CPU-based approaches and near-linear scalability to assemblies with thousands of parts.
For large industrial assemblies such as the Rover engine and the Grand Teton model, spatial relationship inference is reduced from tens of minutes to few seconds. With collections of large assemblies, this turns hours of processing into seconds. Figure 3 summarizes the timing results, and Figure 4 shows the assemblies used for benchmarking.
This level of performance fundamentally changes how assembly feasibility can be evaluated: spatial reasoning becomes an interactive capability rather than a bottleneck.
Toward a Compiler for Physical AI
Fast, robust computation of contact, interference, and clearance relationships is the foundation of automated assembly planning. AutoAssembler’s ASI Engine makes this computation tractable at industrial scale by treating spatial reasoning as a GPU-native problem.
By leveraging NVIDIA Warp, the ASI Engine transforms spatial reasoning from a bottleneck into a first-class planning primitive. This capability enables downstream AI components — including motion inference, precedence constraint construction, and plan search — to operate on real industrial assemblies rather than simplified models.
AutoAssembler is already in production use across advanced manufacturing teams analyzing large industrial assemblies. Spatial analysis that previously required hours of manual inspection now completes in seconds, allowing engineers to iterate on assembly designs with immediate geometric feedback at full fidelity.
We believe this capability represents the beginning of a new computational layer for engineering software.
Physical AI systems require a compiler that converts product geometry into physical action.
Accelerated Spatial Intelligence is the foundation of that compiler.
Explore Accelerated Spatial Intelligence. Learn how AutoAssembler turns CAD models into executable assembly intelligence.